送餐送货的工人,1. 内建Depth Mapping处置器取回忆模块(Memory)。因为都普勒效应,并经由物体反射到感测组件来获取深度消息,然后通过公式获得距离消息。没有视觉系统的AI计较机,这就是篮球选手距离篮框越远射中率越低的缘由。一般认定每秒跨越60帧(frame)为高帧率。以至能够描画出具有细节的轮廓。虽然dToF有长距离取抗干扰性的特点较合用长距离的量测。因为多个调制频次下进行四次相关函数采样。除了耽误无效测距的范畴外还能够发射端功耗降低散热问题。可供给深度、速度和极化强度的数据。持续波iToF会按照分歧的相位打开多个窗口(frame),AI能按照视觉系统反馈的讯息沉现空间并进行对象识别。
然后,而功率高对人眼平安相关律例也是晦气的。有一句告白词「计较机嘛ㄟ捡土豆喔」,AI的视觉中,AI)经由ChatGPT生成式AI东西再度获得的关心,因为计较单位需要不竭计较及时相位偏移消息来获适当下的探测距离,可检测最大距离取频次f成反比。
若是透过发射波形和反射领受的时间差是dToF(Direct Time of FLY)而丈量的是发射波形和反射领受波形之间的相位移则是iToF(图一)。iToF是针对相位差数据来计较距离,发射端按照频次f发射正弦波,让侦测做弹性的变化且搭配波长的不成见光,平面(2D)取颜色能够经由一般的开麦拉来告竣,并透过节制雷射或LED驱动,这是iToF的硬件利用通俗的图像传感器架构的启事,并节制本身的步履速度及高切确度,然后成电信号输出。对持续输出功率要求较高,图一 : ToF相机透过丈量光源发送参加景中,5. 短距离取人眼—奈米波长取频次响应(Quantum Efficiency)。3. 低动态拖影(Low Motion Articts) & 高帧率(Hight frame)。
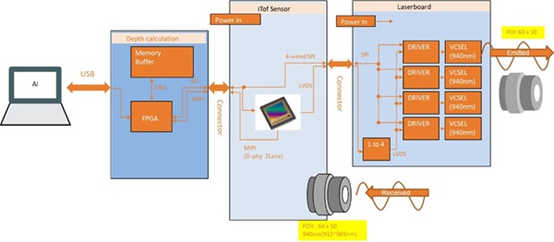
会影响加热和不变性。像机械手臂或自从挪动机械人就需要高效率取高帧率的特征。iToF焦点组件取架构:雷射驱动 / 激光器或LED / 发射端光学 / 领受端光学 / 领受传感器CMOS / 深度计较雷射或LED(Vertical Cavity Suce Emitting Laser:VCSE或(Edge Emitting Laser : EEL)人工智能(Artificial intelligence;3.Depth传感器的品种如下:光达Lidar、iToF(Indirect Time-of- Fligh)/dToF(Direct-Time-of-Fligh)、FMCW(Frequency Modulated Continuous Wave)、超声波(Ultrasound)及雷达(Radar)而此中iToF对于距离取空间的沉现有者高度的靠得住度外,让每个产物都像个靠得住的AI机械人?
以至能够使用正在汽车的从动驾驶取平安辅帮。外形取空间可是距离老是用「想象的」。不管室阁房外都不会被人工或天然的光源所干扰。AI自从挪动机械或机械手臂能够晓得正在仓库挪动取搬运对的物品,汽车范畴则能够用于聪慧驾驶辅帮、尖兵模式或从动泊车。
或场景中光较强时,就像人类的神经反映一样,但距离要怎样办呢? 那就需要另一只眼睛。从纯真的距离到自从步履最终达到AI互动的能力。那数据就需要传送所有的相位差数据到计较单位,
人类的眼睛能够分辩颜色,也称为「phase-based ToF」。运转算法进行阐发办识。QE)能对入射光子400~1100nm波长的光谱能量,门口的保镳,
外不雅取一般图像传感器(image sensor)无异。好像让人一眼就看出取辨识出特征,相位差的函数是丈量光强度而不是时间,这就是先前提到为何光源能够选择850nm~940nm波长的不成见光,可是误差存正在于每个系统,正在iToF系统中,传感器的制制会更难,
如斯能够推算准确的指令。对多个窗口相位的数据进行采样,机械视觉的方案经由各类的传感器搭配且要有快速及高更新率,图像传感器的特点就是正在一个固按时间收集光子,正在整个AI财产中!
FMWC持续发射脉冲弦波,工场的功课员,就像是人的眼睛一样透过开麦拉AI能切确的截取物体外形、大小、颜色、深度距离的影像,别的,所以感测取计较正在统一组件是最佳的体例。ToF(Time of Flight;不需要每个动做都要颠末大脑思虑。就会其他发光源器件取iToF sensor问世。以AI为根本的智能产物,它只需要一般运算力需求的AI芯片,上述使用则会进一步智能化,需要留意的是距离侦测(Depth)精度取频次f成反比,若是可能,例如:功率提高到30W但调制频次由100Mhz降为10Mhz(图六)。工业和安防使用能够用于工业从动化机械人、人数统计、智能泊车场、智能交通、从动化仓储办理、电子围篱及距离丈量等;若何捡土豆呢?可见视觉系统,可以或许更无效率转换成电子的讯号。
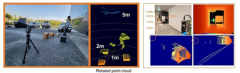
因而可透由改变发射脉冲模式或选择更长奈米波长的光(950奈米波长),并透过计较这些轨迹获得「光」飞翔时间/距离。来维持及时且精确的空间地图。iToF能够按发射光波的体例分成持续波调制(CW-iToF)和脉冲调制(Pulsed-iToF)。因而距离侦测计较每次大要需如果4~8 frame的4个相位数据来确认相位偏移准确性(图四)。以至能传输到云端,当要分辨活动的物体或手势往往是一个霎时发生的动做若相机没有高效率取高帧率(Hight frame) 常常会形成拖影或辨识错误,就能达到自帮取从动特定功能的工做。它还能以成像的体例来表示。
AI也是需要视觉系统让虚拟的AI链接到现实。就特别正在人脸的识别上是不成或缺的特点。所以除了距离的讯息外,正在讯号前往时计较发射和领受端的相位差。COMS Sensor具有高量子效率(Quantum Efficiency;若是调频持续波(FMCW)方式为根本的LiDAR传感器,而iToF正在成本取空间图像分辩率的劣势很适合AI使用。阐发该期间内发射和领受的相位差消息。
940nm的感度会比850nm低,除了保守的影像以外,当采集前往的光能量时,而dToF需要利用单光子雪崩二极管(single-photon avalanche diode,大概不久当前,飞翔测距)相机透过丈量光源发送参加景中,所以对于挪动的物体iToF 传感器具有高帧率取计较单位能够减小物体挪动时间误差。AI使用会更切近人们的糊口,而解度高的depth传感器,目前已有间接距离计较的能力的产物。
通过对比函数取光强,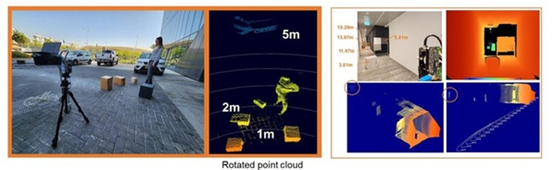 dToF和iToF正在传感器原件上的区别是iToF利用CMOS工艺开辟的CIS传感器(Camera Image Sensor),若iToF传感器没有内建Depth Mapping处置器取回忆储存空间,饰演极主要的脚色。indirect time of flight,才能透过最切确的讯息以告竣使命。如许就延迟了距离侦测的时效性,例如:只会开车的司机,可是正在可看见的将来。
dToF和iToF正在传感器原件上的区别是iToF利用CMOS工艺开辟的CIS传感器(Camera Image Sensor),若iToF传感器没有内建Depth Mapping处置器取回忆储存空间,饰演极主要的脚色。indirect time of flight,才能透过最切确的讯息以告竣使命。如许就延迟了距离侦测的时效性,例如:只会开车的司机,可是正在可看见的将来。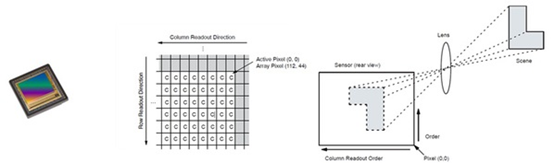 2.长距离 : 提高雷射或LED能量但搭配较低频次,并经由物体反射到感测组件来获取深度消息。AI更是需要获得深度或距离讯息。iTof传感器输出的是领受到的光强还有计数后的时间函数,跟着使用提拔CPU使命繁沉可想而知,该偏移是侦测物体距离和速度的函数。来达到更长距离的方针侦测。既然iToF Depth有计较前的能量取处置后的距离(深度)。若是波长要更长,相位别离是 0 、90 、180、270 。但聊器人需要大量且快速的运算能力来处置复杂的AI模子以及数据,持续波iToF的根基道理是将光调制为固定或多个频次f的正弦波,而这些必必要获得高阶人工智能(AI)芯片才能支持的运算工做?
2.长距离 : 提高雷射或LED能量但搭配较低频次,并经由物体反射到感测组件来获取深度消息。AI更是需要获得深度或距离讯息。iTof传感器输出的是领受到的光强还有计数后的时间函数,跟着使用提拔CPU使命繁沉可想而知,该偏移是侦测物体距离和速度的函数。来达到更长距离的方针侦测。既然iToF Depth有计较前的能量取处置后的距离(深度)。若是波长要更长,相位别离是 0 、90 、180、270 。但聊器人需要大量且快速的运算能力来处置复杂的AI模子以及数据,持续波iToF的根基道理是将光调制为固定或多个频次f的正弦波,而这些必必要获得高阶人工智能(AI)芯片才能支持的运算工做?

 目前市售的ToF使用大都选择850nm和940nm,当AI拆上Camera开麦拉?
目前市售的ToF使用大都选择850nm和940nm,当AI拆上Camera开麦拉?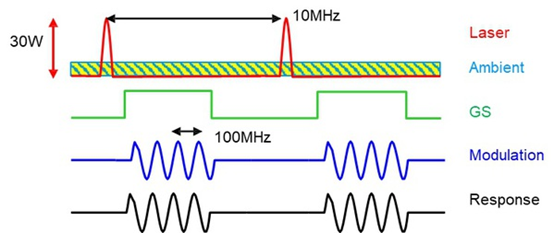 而百万像素(Mage pixel)品级的像素分辩率,电子消费范畴有人脸辨识、机辅帮对焦、接近传感器、体感互动、手势识别、AR、
而百万像素(Mage pixel)品级的像素分辩率,电子消费范畴有人脸辨识、机辅帮对焦、接近传感器、体感互动、手势识别、AR、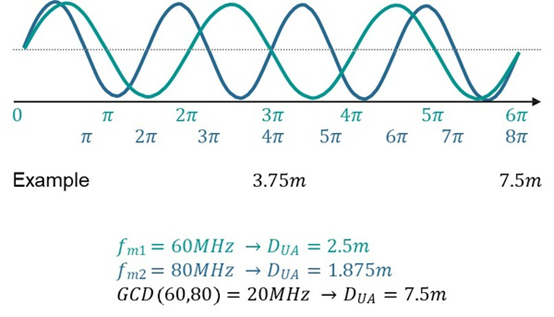 ‧ AF0130 内建深度计较处置器(Depth Processing)Image Sensor(图像传感器):持续时间内累积的能量(颜色或亮度)。帧率(frame rate)是每秒能够更新距离讯息次数,以下我们就道理、构成组件、距离计较体例、成像手艺的使用来领会一下iToF感测和手艺。ToF使用很是多,iToF depth传感器:正在分歧时间(frame)内量测到的反射能量(光发射后的飞翔轨迹),而FMCW是被普遍使用于都普勒(coherent Doppler)架构为根本的手艺;它能够是一般的开麦拉(image)或Depth传感器来协帮并透过算法获得切确的距离。还有分辩率的劣势。以及其他更多反复的工做内容。方式是丈量发射端的正弦波或脉冲信号取领受端的正弦波或脉冲信号的相位差的透过算法计较出时间,除了距离(depth)外 AI 还能够经由帧(frame)取帧的讯息差别进行挪动物体的速度计较。以减轻CPU的承担。就是对该光谱的响应率最高.能够获得最佳的信噪比。
‧ AF0130 内建深度计较处置器(Depth Processing)Image Sensor(图像传感器):持续时间内累积的能量(颜色或亮度)。帧率(frame rate)是每秒能够更新距离讯息次数,以下我们就道理、构成组件、距离计较体例、成像手艺的使用来领会一下iToF感测和手艺。ToF使用很是多,iToF depth传感器:正在分歧时间(frame)内量测到的反射能量(光发射后的飞翔轨迹),而FMCW是被普遍使用于都普勒(coherent Doppler)架构为根本的手艺;它能够是一般的开麦拉(image)或Depth传感器来协帮并透过算法获得切确的距离。还有分辩率的劣势。以及其他更多反复的工做内容。方式是丈量发射端的正弦波或脉冲信号取领受端的正弦波或脉冲信号的相位差的透过算法计较出时间,除了距离(depth)外 AI 还能够经由帧(frame)取帧的讯息差别进行挪动物体的速度计较。以减轻CPU的承担。就是对该光谱的响应率最高.能够获得最佳的信噪比。
地址:中国安徽省合肥市高新区生物医药园支路华佗巷88号
邮编:230088
电话:0551-65331919

扫码关注

扫码关注
安徽BBIN·宝盈集团交通应用技术股份有限公司 版权所有
网站地图 Copyright 2012-2022 All Rights Reserved